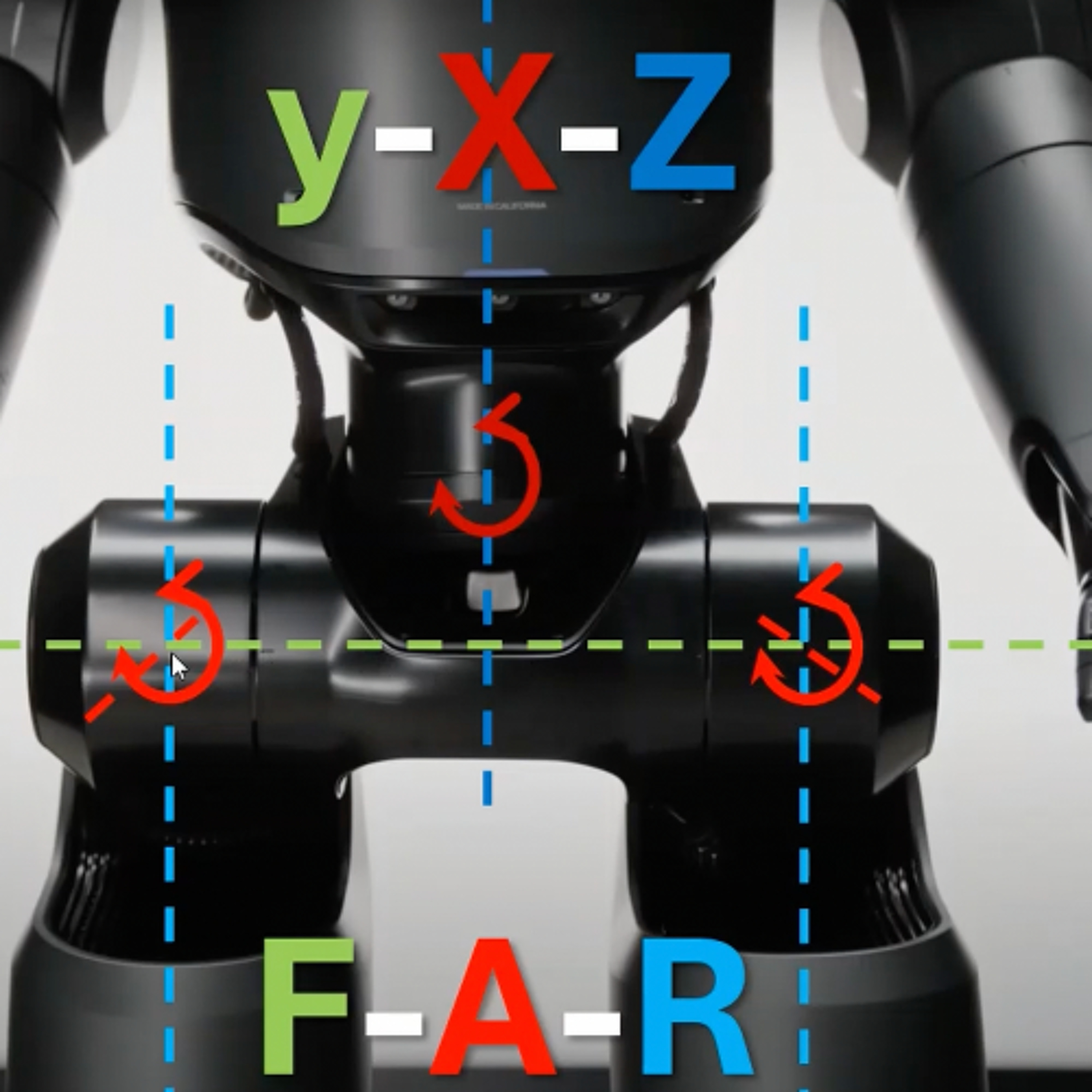
This episode explores the gait analysis of humanoid robots, comparing their walking styles to human locomotion. Against the backdrop of recent advancements in reinforcement learning for robot walking, the discussion analyzes videos from Figure and Tesla, highlighting improvements in stride length and speed. More significantly, the conversation delves into the kinematic configurations of different robots, such as Unitree's ARF and FAR architectures, and their impact on walking efficiency. For instance, the analysis reveals that the rotation axis placement significantly affects gait, with misaligned axes leading to suboptimal walking patterns. The hosts discuss the importance of emulating human-like gait as a starting point for reinforcement learning, even acknowledging potential limitations of directly mimicking human biomechanics. In contrast, the episode also examines a German company, Neura, and their unique approach to humanoid robot design, showcasing innovative mechanical solutions and raising questions about their AI strategy. What this means for the future of humanoid robotics is a continued focus on refining kinematic designs and leveraging reinforcement learning to achieve more natural and efficient locomotion.
Sign in to continue reading, translating and more.
Continue